

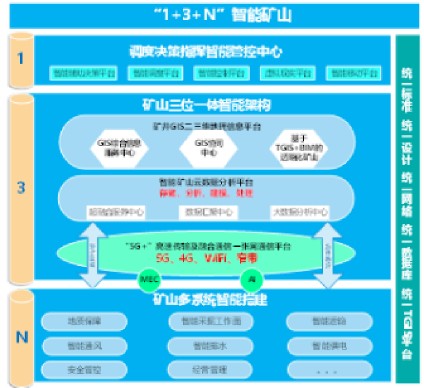
智能开采是一个复杂的高科技系统工程,实现井工煤矿的真正无人开采,不亚于登月工程;在统一标准、设计、网络、数据库、平台的原则下开展五大体系的研究和顶层设计,形成“1+3+N”的管控模式。
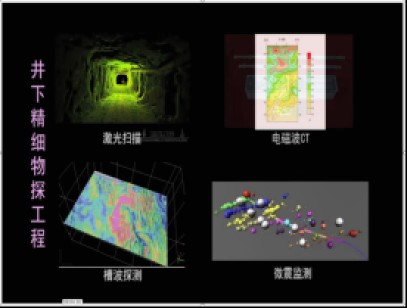
实现煤矿少人或无人化开采的重要基础是包括地质、测量、装备以及开采环境的透明化以及数字孪生管控。为此,得继续深入开展如下研究:

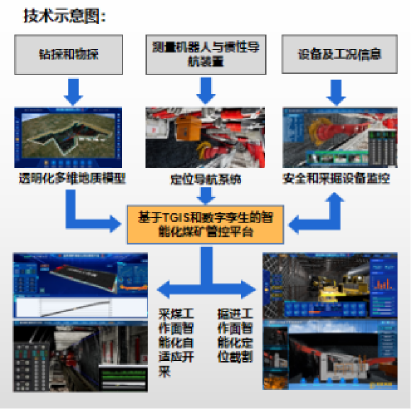
通过时态地理信息系统(TGIS)、人工智能、透明化地质、数字孪生、工业互联网、云计算、精确定姿定位、时空大数据、智能协同控制等高新技术和装备与现代煤炭开发技术的深入融合,构建自主可控的智能化煤矿操作系统,形成能够满足智能化煤矿建设的“标准体系、技术体系、装备体系、管理体系、培训体系”以及全面感知、实时互联、分析决策、自主学习、动态预测、协同控制的采矿系统,实现煤矿开拓、采掘(剥)、运输、通风、洗选、安全保障、经营管理等全过程的智能化运行和井下危险区域的少人、无人化作业,提高煤矿的安全管控水平,确保煤矿的绿色生产和高产高效。
| 岗位名称 | 专业要求 | 工作内容 | 任职要求 | 需求人数 |
|---|---|---|---|---|
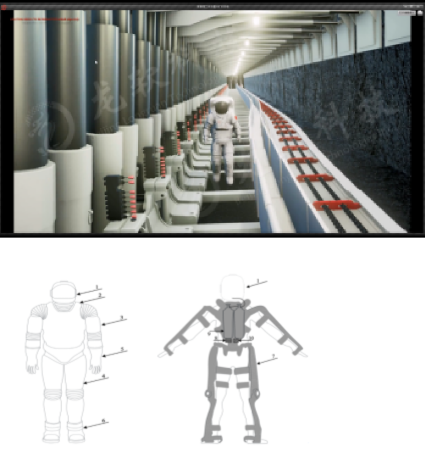
| 机器人矿工研发工程师 | 机器人工程、机械电子工程、机电一体化技术、机械制造及其自动化、智能科学与技术、计算机科学与技术、软件工程等相关专业 | 1.负责或参与煤矿巡检、爬行、人形机器人的软硬件开发,包括但不限于技术栈选择、系统方案架构、业务模块架构、运动控制、远程控制、外围设备集成和编程等; 2.结合煤炭行业特定应用场景,研究具体场景机器人的技术路线; 3.负责或参与产品和项目的需求分析和系统设计,编写技术文档; 4.完成领导交办的其他工作。 |
1.硕士及以上学历. 2.有机器人本体设计、机器人控制硬件、软件开发能力; 3.熟悉机器人运动学、动力学和控制理论,数学功底强,具有较强的逻辑分析能力; 4.熟练使用C、C++和Python语言,具备Linux下开发应用能力,熟悉ROS、OpenCV等开源机器人资源; 5.熟悉矿用产品伺服驱动技术、机器人控制、机器人动力学、程序设计等机器人相关专业知识,懂机械设计和矿用产品设计规范者优先; 6.熟悉KUKA、ABB、FANUC等工业机器人;熟悉宇树、优必选四足机器人或人形机器人,有相关控制系统软硬件设计经验者优先; 7.具备良好的团队协作精神,对内对外良好的沟通能力,对机器人设计开发有浓厚的兴趣,动手能力强,有志于从事机器人矿工的研究与开发工作。 |
3 |